Egami Tadashi
江上 正 教授

Profile
生年/1959年7月17日
出身地/山梨県
血液型/A型
家族構成/妻と娘2人
子供の頃の夢/発明家
愛読書/『氷点』
趣味/庭いじり、温泉、旅行
休日の過ごし方/近くの公園で散策など
好きな食べ物/ほうとう、吉田のうどん
宇宙までエレベーターで行き来できる。 そんな夢のような時代がやってくるかもしれません。
宇宙エレベーターや、福祉・災害支援に役立つロボットの開発
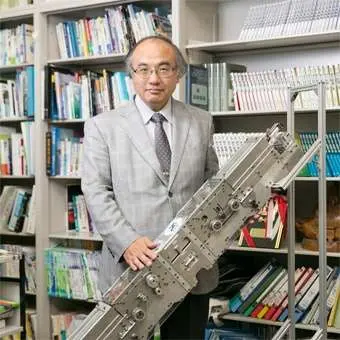
私の専門はロボット工学や制御工学で、最近は宇宙エレベータークライマーシステムの開発にも力を入れています。宇宙エレベーターとはその名の通り、地上から宇宙までテザー(ケーブル)をのばし、クライマー(昇降機)を使って人や荷物を運ぶという構想で、ロケットに代わる宇宙への移送手段として期待されています。想定されている速度は新幹線並みで、地上から3万6000㎞の静止軌道ステーションまで1週間かかることになりますが、ロケットの発射時のように急激な加速度がかからないため、実現すれば特別な訓練をすることなく、誰でも宇宙に行くことができるようになるでしょう。
夢のような話だと思われるかもしれませんが、研究は着々と進められています。私の研究室でも、クライマーの機構に着目して、新しい推進方式や姿勢制御などを中心にクライマーの開発に注力し、論文や特許などにもなっています。また2014年の宇宙エレベーターチャレンジでは、ロープテザーとしては世界最高高度記録となる1.15kmの昇降を実現しています。ひと筋縄でいく研究ではありませんが、技術的な側面だけで言えば、2050年くらいには実現できるのではないでしょうか。本学では現在、研究室の垣根を越え、工学部の他学科や文系の学生も含めたプロジェクトを立ち上げ、大学からの支援を受けて活動しています。
この他に、自動車や工作機械等に使われる経路制御を可視化したボール&プレート経路制御装置の開発、車椅子ロボットや電動義足、柔軟関節を持つ4脚ロボットなどの福祉・災害支援ロボットの開発、従来のロボットハンドをよりシンプルに改良したアイリスロボットハンドの開発、といった研究も同時に進めています。
授業の中から何かひとつでも感動できるものを見つけてほしい
モノを作って動かすのが機械工学ですが、制御工学はその中核を担っています。制御とは自分の思い通りにモノを動かすことです。私は大学時代に初めて制御のシミュレーションを行ったとき、目標値を変えても必ず応答がついてくることに感動しました。そして制御についてもっと研究してみたいと思い、専門に選びました。
制御工学には、どのようにモノを動かすかという理論的な部分と、実際にモノを動かすためのハード的な部分があります。担当している「自動制御Ⅰ・Ⅱ」の授業では主に理論的な部分について、「メカトロニクス」の授業ではハード的な部分について講義しています。いずれの授業も、空白部分を設けたパワーポイントの資料を事前に配布し、学生の皆さんがその空白部分を埋めていくことで、能動的に学べるよう工夫しています。また、制御が実際にどのように使われているのか、というイメージをつかんでもらえるよう、実物や模型、ビデオなどを取り入れています。
私の場合は大学の授業で制御工学という学問に出会いました。できれば学生の皆さんにも、授業の中から何かひとつでも感動できるものを見つけてもらいたい。そういう思いで教壇に立っています。
ロボット制御システム研究室

ロボットを開発し思い通りに動かす
機械は動いて初めて人の役に立ちます。私の研究室では、新しいロボットを開発し、それを思い通りに動かす研究を行っています。
宇宙エレベータークライマーの新しい駆動方式、姿勢制御、ブレーキ、押付力調整機構などの開発を進め、この技術を応用した高圧鉄塔検査クライマーの開発も進めています。またアイリス機構を用いたロボットハンド、このロボットハンドを搭載したドローンの開発、段差乗り越え機構を用いた倒立振子型電動車椅子、柔軟関節を持つ4脚ロボットなど福祉・災害支援ロボットの開発も行っています。学会発表や特許出願、展示会などへの出展も積極的に行っています。
ロボットシステムを「作って」それを「動かす」ことを総合的に行っている研究室と言えます。
Photos
-

大学では柔道部に所属していましたが、練習の辛さや怪我などから黒帯目前で挫折してしまいました。いつか黒帯を取りたいと思い続け、40歳のときに一念発起して道場に通い、念願の黒帯を取ることができました
-
宇宙エレベーターのシンボルマークと著書の『現代制御工学-基礎から応用へ-』
-
専門の制御工学やメカトロニクスに関する共著書です。『現代制御工学―基礎から応用へー』、『電気機器とサーボモータ』(産業図書)は、教科書として授業でも使用しています

地域課題
SDGs・地域課題について

江上 正先生の関連ニュース
-

工学研究科機械工学領域の白井大翔さんが「第23回建設ロボットシンポジウム」で優秀ポスター賞を受賞
-

「YOXO FESTIVAL 2024」に宇宙ロケット・宇宙エレベーターが出展しました
-

JECA FAIR 2024~第72回電設工業展~で工学部機械工学科 江上 正教授の研究が紹介されました
-

工学研究科 川口舞子さん(江上研究室)が、第56回計測自動制御学会北海道支部学術講演会奨励賞を受賞
-

「SDGs最前線 神奈川大学のいま」で、地球規模の課題解決へ果敢に挑戦として、宇宙エレベータープロジェクトが掲載されました
-

工学部宇宙エレベータープロジェクト×神奈川大学附属学校宇宙エレベーターチーム
-

神大テクノフェスタ2023「くらしと環境の未来 住み続けられるまちづくりを」
-

工学部江上研究室と宇宙エレベータープロジェクトがSPEC×ROCで賞を受賞
-

工学研究科 野中祐太郎さんが建設ロボットシンポジウムで優秀ポスター賞を受賞
-

江上研究室 野中祐太郎さんが、計測自動制御学会北海道支部学術講演会で奨励賞

他の先生もチェック!
-

工学部 機械工学科
荒木 陽三 特別助教
- 氏名
-
荒木 陽三 特別助教
-

工学部 機械工学科
伊東 弘行 教授
- 氏名
-
伊東 弘行 教授
- 専門分野
-
燃焼学、熱工学、宇宙環境利用工学、設計製図
- ゼミ・研究室
- 熱エネルギー工学研究室
-
工学部 機械工学科
林 憲玉 教授
- 氏名
-
林 憲玉 教授
- 専門分野
-
ロボット工学、制御工学、知能機械工学、メカトロニクス
- ゼミ・研究室
- ロボティクス研究室
-

工学部 機械工学科
張 斌 准教授
- 氏名
-
張 斌 准教授
- 専門分野
-
知能ロボティクス、知能機械学・機械システム、ヒューマンインターフェース・インタラクション
- ゼミ・研究室
- 知能機械研究室
-
工学部 機械工学科
鈴木 健児 助教
- 氏名
-
鈴木 健児 助教
- 専門分野
-
流体工学、設計工学、機械機能要素、機械力学・制御
- ゼミ・研究室
- 精密加工学研究室
-

工学部 機械工学科
髙野 敦 教授
- 氏名
-
髙野 敦 教授
- 専門分野
-
航空宇宙工学、構造力学、複合材料
- ゼミ・研究室
- 航空宇宙構造研究室
-

工学部 機械工学科
竹村 兼一 教授
- 氏名
-
竹村 兼一 教授
- 専門分野
-
機械材料、材料力学、複合材料、物性
- ゼミ・研究室
- 材料力学研究室
-

工学部 機械工学科
寺島 岳史 准教授
- 氏名
-
寺島 岳史 准教授
- 専門分野
-
非平衡材料、機械材料、接合工学
- ゼミ・研究室
- 機能材料加工学研究室
-

工学部 機械工学科
中尾 陽一 教授
- 氏名
-
中尾 陽一 教授
- 専門分野
-
機械工作・生産工学、機械力学・制御、知能機械学・機械システム
- ゼミ・研究室
- 精密機械システム研究室
-

工学部 機械工学科
中西 裕二 教授
- 氏名
-
中西 裕二 教授
- 専門分野
-
流体工学
- ゼミ・研究室
- 流体工学研究室
-
工学部 機械工学科
長谷 亜蘭 教授
- 氏名
-
長谷 亜蘭 教授
-

工学部 機械工学科
長谷川 実嗣 特別助教
- 氏名
-
長谷川 実嗣 特別助教
- 専門分野
-
流体工学、空気力学
-

工学部 機械工学科
幡野 慎太郎 特別助手
- 氏名
-
幡野 慎太郎 特別助手
- 専門分野
-
航空宇宙工学
- ゼミ・研究室
- 航空宇宙構造研究室
-

工学部 機械工学科
原村 嘉彦 教授
- 氏名
-
原村 嘉彦 教授
- 専門分野
-
熱工学
- ゼミ・研究室
- 熱工学研究室
-

工学部 機械工学科
峯下 弘毅 特別助教
- 氏名
-
峯下 弘毅 特別助教
- 専門分野
-
ロボティクス、知能機械システム
- ゼミ・研究室
- ロボティクス研究室
-

工学部 機械工学科
諸隈 崇幸 特別助教
- 氏名
-
諸隈 崇幸 特別助教
- 専門分野
-
熱工学
- ゼミ・研究室
- 熱工学研究室
-

工学部 機械工学科
矢野 大志 特別助教
- 氏名
-
矢野 大志 特別助教
- 専門分野
-
熱工学、流体工学
- ゼミ・研究室
- 流体工学研究室
-

工学部 機械工学科
山崎 徹 教授
- 氏名
-
山崎 徹 教授
- 専門分野
-
機械力学・制御
- ゼミ・研究室
- 機械力学研究室
-

工学部 機械工学科
脇谷 趣聞 特別助教
- 氏名
-
脇谷 趣聞 特別助教
- 専門分野
-
工作機械、スピンドル、超精密加工システム
- ゼミ・研究室
- 精密機械システム研究室